781 IEEE_UPP_Garage unit control
781 : IEEE_UPP_Garage unit control

- Author: Sadrac Santiago, Carlos Romero and Martin Amastal
- Description: Sistema de control para controlar apertura, cierre y paro de un garage con un solo botón
- GitHub repository
- Open in 3D viewer
- Clock: 1000000 Hz
How it works
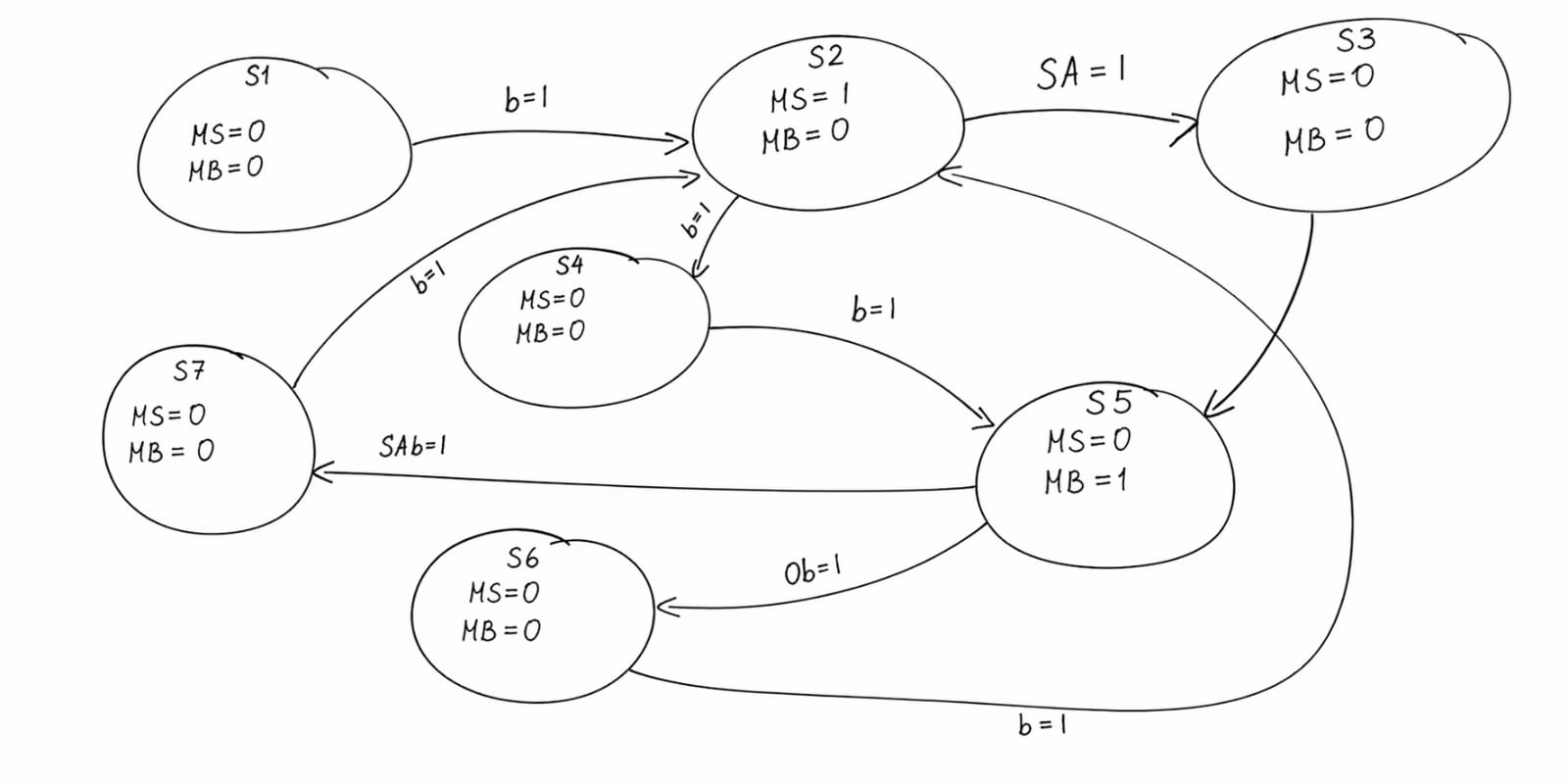
The project implements a finite state machine (FSM) that controls the behavior of an automatic garage door opener. The system changes state with each clock pulse (clk) and can be reset with the rst signal, returning to its initial state. The operation is based on the following inputs: b (button): at press, the door open, close or stop, depending its actual state. SA and SAB (position sensors): detects if door is closed or open. ob (obstruction): if the door is closing and detect an object crossing it, the system automatically stop the door and inmediately open it. Depending on the current state and the inputs, the system determines the next state and activates the outputs: MS (upward motor): Open the door. MB (downward motor): Close the door. The general flow is described in the Finite State Machine (See the diagram):
How to test
Press the reset buttom to initialize the system. Press the button "btn" to start the process and open the garage (MS=1 and MB=0), connect two LEDs on MS and MB or a H-bridge with a motor. Activate the SA sensor to simulate the door is completely open. Press the button again to initiate closing. Activate SAB to indicate completely closed, or activate ob to simulate an obstruction. Observe the LEDs in each case: MS on indicates up movement. MB on indicates down movement.
External hardware
You need only two LEDs connected on MS and MB terminals. You can improve the test with a H-bridge and a DC motor.
IO
| # | Input | Output | Bidirectional |
|---|---|---|---|
| 0 | btn | MS | |
| 1 | ob | MB | |
| 2 | SA | ||
| 3 | SAB | ||
| 4 | |||
| 5 | |||
| 6 | |||
| 7 |